The humanoid diving robot OceanOne seen during a presentation at the History Museum in Marseille, France, April 28, 2016. REUTERS/Jean-Paul Pelissier
Some really, really smart people at Stanford University have built human-like robot that they hope could one day revolutionize subsea exploration and other underwater tasks considered far too dangerous for human divers.
The humanoid robotic diver, named OceanOne, was presented Thursday at the History Museum in Marseille, where the OceanOne team announced the success of the robot’s maiden voyage to the wreck of La Lune, the flagship of King Louis XIV, which sank in 1664 in the Mediterranean about 20 miles off the southern coast of France.
In addition to exploring shipwrecks, the team is hoping that OceanOne could be developed to find work in disaster relief, ship repair, offshore oil and gas, and other areas of oceanographic research where the presence of actual human divers is considered too dangerous or impossible.
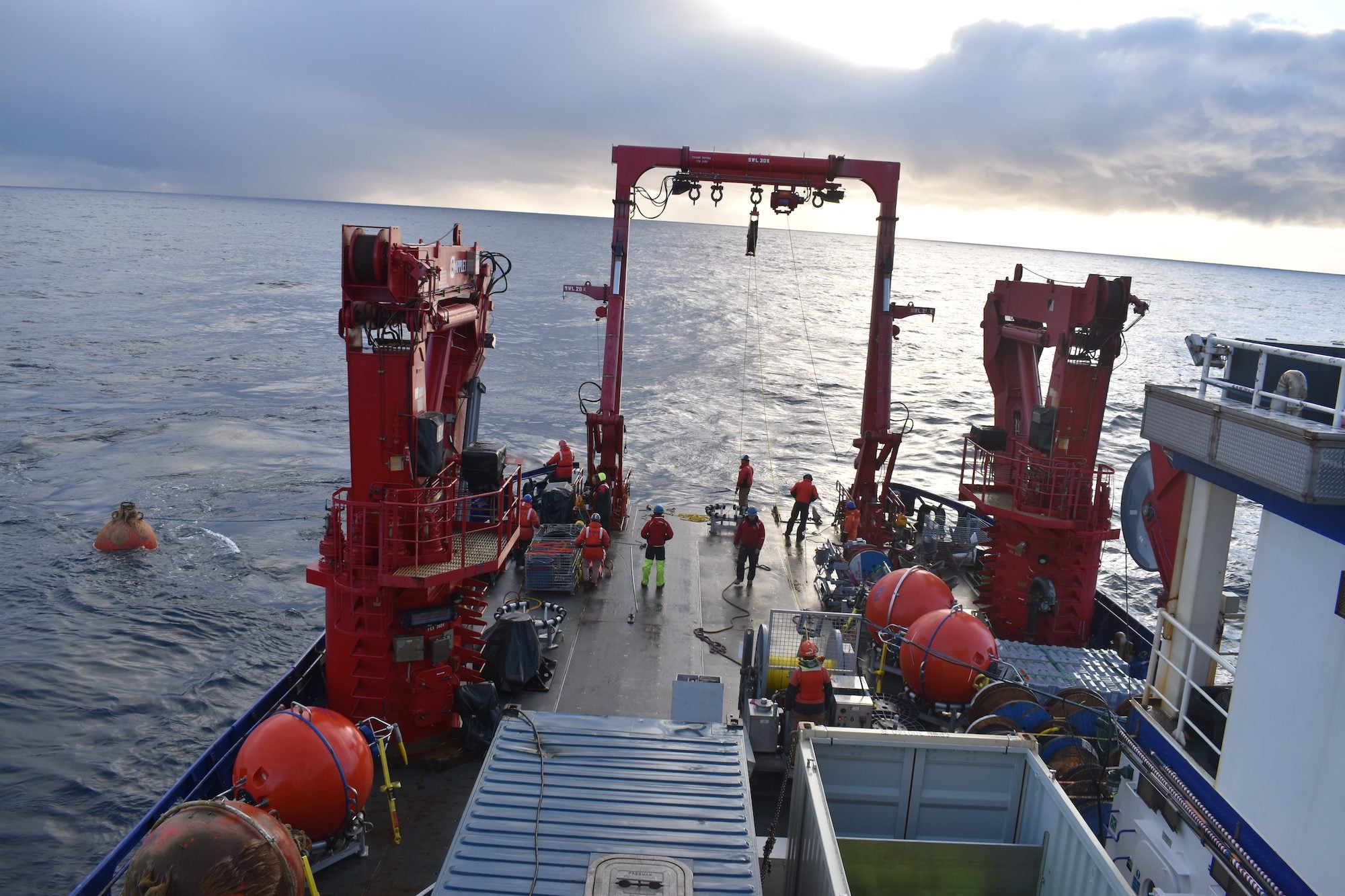
Before descending to La Lune, OceanOne was tested rigorously in the waters along the southern coast of France. Photo: Frederic Osada and Teddy Seguin/DRASSM
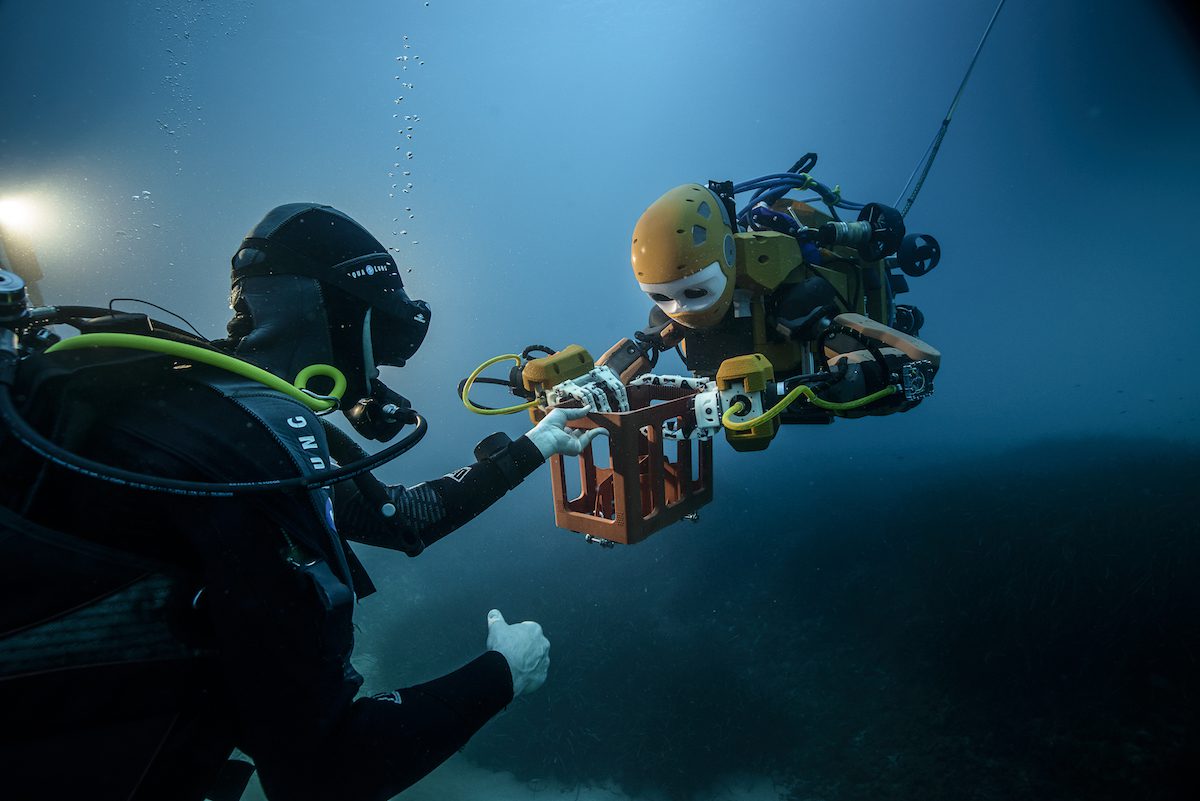
The appearance of OceanOne has been described as something like a robo-mermaid, measuring roughly five feet long with a long torso, head, and two fully articulated arms. The “tail” section houses batteries, computers and eight multi-directional thrusters. But the OceanOne team says it’s the hands that really set their robot apart from other submersibles:
Each fully articulated wrist is fitted with force sensors that relay haptic feedback to the pilot’s controls, so the human can feel whether the robot is grasping something firm and heavy, or light and delicate. (Eventually, each finger will be covered with tactile sensors.) The ‘bot’s brain also reads the data and makes sure that its hands keep a firm grip on objects, but that they don’t damage things by squeezing too tightly.
“You can feel exactly what the robot is doing,” said Oussama Khatib, a professor of computer science at Stanford who leading the OceanOne project. “It’s almost like you are there; with the sense of touch you create a new dimension of perception.”
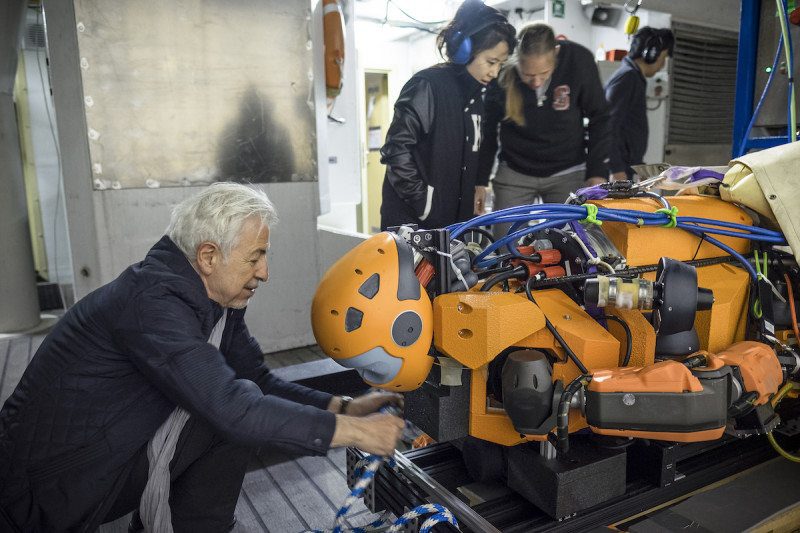
For the past few years, OceanOne has been Stanford professor Oussama Khatib’s passion project. Photo credit: Frederic Osada and Teddy Seguin/DRASSM
The OceanOne is powered by artificial intelligence and haptic (touch) feedback systems, allowing human pilots to explore the deep ocean – at least deeper than humans are capable – in high fidelity. For the most part, the pilots won’t need to lift a finger, but at any point can take over the controls.
Sensors throughout the robot gauge current and turbulence, automatically activating the thrusters to keep the robot in place. And even as the body moves, quick-firing motors adjust the arms to keep its hands steady as it works. Navigation relies on perception of the environment, from both sensors and cameras, and these data run through smart algorithms that help OceanOne avoid collisions. If it senses that its thrusters won’t slow it down quickly enough, it can quickly brace for impact with its arms, an advantage of a humanoid body build.
Not only can the OceanOne robot take the place of humans, but it can also work side-by-side with other human divers, allowing the pilot to communicate by using hand gestures.
Khatib designed OceanOne with joint operations with human divers in mind. The ability to easily hand objects from robot to human is a defining feature of OceanOne.
“We connect the human to the robot in very intuitive and meaningful way. The human can provide intuition and expertise and cognitive abilities to the robot,” Khatib said. “The two bring together an amazing synergy. The human and robot can do things in areas too dangerous for a human, while the human is still there.”
Several students played key roles in OceanOne’s success, including a handful of graduate students who joined Khatib in France for the expedition, as well as a number of undergraduate and graduate students. Khatib also drew on the expertise of Mark Cutkosky, a professor of mechanical engineering, for designing and building the robotic arms.
Next month, OceanOne will return to the campus of Stanford University in heart of California’s Silicon Valley, where Khatib and his students will continue to develop the platform. Right now the prototype robot is a lonely fleet of one, but Khatib hopes to build more units, which of course would work in concert in future tasks.
The U.S. National Science Foundation (NSF) has begun a major downsizing of one of the world’s largest ocean observing networks, announcing plans to remove most of the in-water infrastructure associated...
By Jonathan Saul LONDON, June 21 (Reuters) – Plans to map the entire ocean floor by 2030 are going ahead despite the challenges of the coronavirus crisis, officials leading the...
By Andrew R.C. Marshall OXFORD, England, Dec 11 (Reuters) – On November 14, 1881, an American called George Melville limped across a frozen delta in Siberia and pulled a pole...
December 11, 2019
Total Views: 216
Get The Industry’s Go-To News
Subscribe to gCaptain Daily and stay informed with the latest global maritime and offshore news
— just like 104,562 professionals
Secure Your Spot
on the gCaptain Crew
Stay informed with the latest maritime and offshore news, delivered daily straight to your inbox
— trusted by our 104,562 members
Your Gateway to the Maritime World!
Essential news coupled with the finest maritime content sourced from across the globe.

 Join The Club
Join The Club