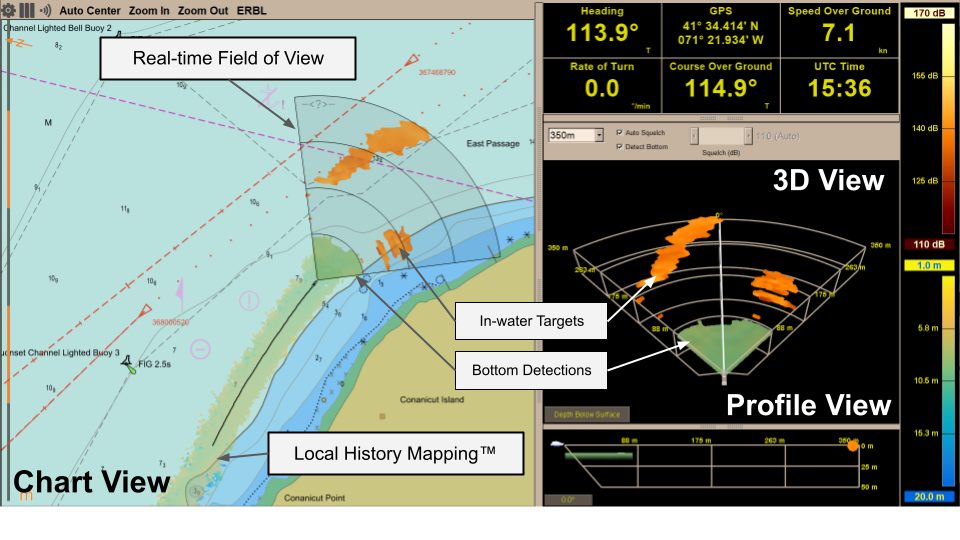
All Argos FLS systems use FarSounder’s SonaSoft™ software for processing and displaying data. Its main function is to view real-time data in the path of the vessel. In addition to detecting the seafloor and hazards ahead in real-time, it also has a unique application called Local History Mapping™. The application stores this data for use as additional information to supplement older chart data.
Local History Mapping™ (LHM) Explained
Argos’ real-time sonar data is displayed in a “top down” representation overlaid on an Electronic Nautical Chart (ENC). A history of bathymetric data is stored as the vessel moves along its route. This data is an average of the seafloor detections over all of the pings in an area. It is most commonly displayed with color mapped to depth though it can also be shown with color mapped to signal strength. Essentially, a map of the seafloor is created from the vessel’s recent history and displayed for operator use.
Raw detection data from a single ping of an Argos 3D Forward Looking Sonar can contain many individual detections of the seafloor. Further, as the vessel moves forward, there is typically quite significant overlap between the current ping and the previous pings. Averaging this data serves the purpose of giving an improved estimate of the depth along with an idea of the uncertainty, but also makes it much easier to work with and display.
Real World Results
In order to record the depth at a given location and time and then refer to that depth again at another time, it’s necessary to compensate for the current tide height. The changes are significant to navigation, even in a region with relatively small tidal range. It can be even more pronounced in areas with extreme tidal range, for example the Cook Inlet station in Alaska predicts a 9 meter difference between high and low tide for April 1st, 2022.
This issue is discussed in more detail in the linked paper and options for obtaining the tide height as a prediction versus using historical values in post processing are compared. To store LHM data indefinitely, it is necessary to correct the depths to a common reference point or datum, and in SonaSoft this is currently done “on the fly” using Admiralty TotalTides data to predict the tide height at given location and time. Currently, if no Admiralty license is available, only about an hour of LHM history will be stored to avoid displaying any data that has not been corrected for height changes.
LHM Use Case
One of the most common use cases of LHM data is to perform a short survey in an area where the vessel is about to anchor. After making just a few passes of the area, the vessel will have a history of the depths in the area. The captain or navigation officer can decide where to anchor, and then in the case the vessel rotates or drifts slightly with changes in tide, they will still have a clear picture of the depths around the vessel. To illustrate this use case, on a recent engineering test an “anchor survey” was performed using an Argos system near a rocky island in Narragansett Bay.
Local History Mapping™ data shown in the Chart View after performing a short survey in Narragansett Bay, Rhode Island with an Argos sonar.
The video of this dataset is available below:
All FarSounder Argos systems are capable of creating and storing Local History Mapping™. For reasons explained above, in order to store data for more than one hour, tide correction (in this case via Admiralty Total Tides) must be applied. Once that is available, the vessel will by mapping on the fly, everywhere it goes. This bathymetric data is saved indefinitely, and updated when more sonar data is collected in the same area. More specifically, when new data is collected in an area where data exists, that existing data is updated if it is less than one week old. Otherwise, it is replaced by the new data. This algorithm makes sure the vessel always displays and records the best quality data in a given area.
While processing and displaying sonar detections for real-time navigation is the main purpose of FarSounder’s Argos systems, valuable historical data is also generated and recorded for later use. This LHM feature is an important application to give the crew optimal situational awareness for many types of applications and is going to be expanded with software updates in the coming years. Stay up to date by connecting with FarSounder on LinkedIn, Facebook, YouTube or Instagram.
The maritime industry is undergoing rapid change. Advancements in autonomy are allowing uncrewed vessels to transit oceans with growing sophistication. A growing network of marine technologies is paving the way...
The next era of naval superiority will be decided by how effectively USVs integrate within broader fleet operations. Unmanned and autonomous systems are rapidly reshaping naval operations, advancing from experimental...
As unmanned and autonomous surface vessels (USVs) expand their role in the maritime sector, their missions are moving into increasingly complex and dynamic environments that often present unpredictable hazards. These...
May 19, 2025
Total Views: 1554
Get The Industry’s Go-To News
Subscribe to gCaptain Daily and stay informed with the latest global maritime and offshore news
— just like 104,711 professionals
Secure Your Spot
on the gCaptain Crew
Stay informed with the latest maritime and offshore news, delivered daily straight to your inbox
— trusted by our 104,711 members
Your Gateway to the Maritime World!
Essential news coupled with the finest maritime content sourced from across the globe.

 Join The Club
Join The Club