Back in June gCaptain reported on James Cameron’s offer to dive the wreck of the Deepwater Horizon but, despite three official requests for information, the USCG refused to tell us if they would accept his proposal. Today gCaptain has, through independent research, found the answer… no.
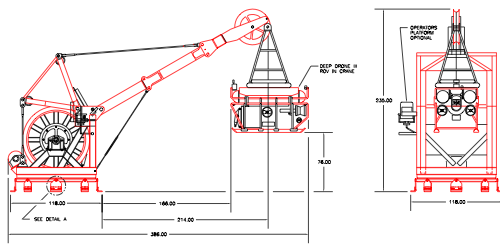
Rather than allow Cameron’s team the opportunity to dive on the wreckage the USCG has solicited bids from US flagged workboats capable of mounting a US Navy ROV. While no timetable is set for the operation and no details have been provided on whether they intend to search for and recover the remains of the 11 missing workers who may still be aboard the rig. There is, however, a technical drawing of the ROV (image above) they intend to use to perform the survey and an FAQ that has been published.
The following is an overview of the limited information we do know:
The following are the specs of the Deep Drone ROV system that will conduct the survey:
 DEEP DRONE is a 4,100-pound Remotely Operated Vehicle (ROC) that is designed to meet the Navy’s mid-water salvage requirements down to a maximum depth of 8,000 feet seawater.
DEEP DRONE is a 4,100-pound Remotely Operated Vehicle (ROC) that is designed to meet the Navy’s mid-water salvage requirements down to a maximum depth of 8,000 feet seawater.
The system consists of the vehicle, umbilical cable, motion-compensated handling system, deck hydraulic power unit, generator, operations van and maintenance van. Navigation is accomplished with an ultra-short baseline acoustic tracking system. Two handling systems are available, Sea Horse I for shallow operations (6000 feet) and Sea Horse II for deeper operations (8000 feet).
The operator can control the ROV in all six degrees of motion with auto-control functions for depth, altitude, and heading. The vehicle is equipped with CTFM sonar that can detect acoustic pingers and identify small targets to a distance of 2,000 feet. DEEP DRONE uses both electric and hydraulic thrusters for propulsion. It has two seven-function manipulators capable of working with tools and attaching rigging. For photographic documentation, the vehicle has a digital still camera with a strobe and both black and white and color television cameras.
For special operations, the ROV can accommodate custom, skid-mounted tool packages. These packages could include, but are not limited to, trenchers, specialized salvage tools, and instrument packages or other mission-oriented equipment. The system is air transportable and can operate from any capable platform of opportunity.
GENERAL SPECIFICATIONS
VEHICLE
1. Length – 9 ft, 3 in
2. Width – 4 ft, 7 in
3. Height – 6 ft, 2 in
3. Weight – 4,100 lbs
PERFORMANCE
1. Depth – 8,000 ft of seawater
2. Speed – 3 knots (5 knots optional)
3. Auto Controls – Depth, altitude, heading
4. Lift Capacity – 3,200 lbs. (via vehicle)
5. Payload – 300 lbs.
INSTRUMENTATION
1. Navigation
Fiber optic Gyrocompass (+/-0.02 deg)
Fluxgate Magnetic Compass
1200 kHz Doppler Velocity Log
Ultra Short Baseline Tracking (17kHz)
2. Sonar
(1) CTFM with 2000 ft, max. Range with pinger locator (27/37.5/45kHz)
1 Mhz or 1.8 Mhz Multibeam (DIDSON)
3. Cameras
(1) 600-line SIT video wide angle Black and White (fixed)
(1) 460-line color video on pan and tilt
(1) 360-line rear looking color with LED lights
(1) 3.3-Meg Pixel Digital Sitll with strobe
5. Lights
(2) 500-Watt fixed
(1) 250-Watt on pan & tilt
6. Tools
(2) 7-function manipulators (150 lb lift at 60 in maximum extension)
(2) load release hooks
(2) 3,000 psi, 8 gpm auxiliary hydraulic functions
Updated: February 5, 2026 (Originally published August 14, 2010)
Editorial Standards · Corrections · About gCaptain

 Join The Club
Join The Club









{kind=link}